
デジタリストニュース
豊田通商、高速道路でのトラックの後続車無人隊列走行技術を実現


- TOP
- >
- 豊田通商、高速道路でのトラックの後続車無人隊列走行技術を実現
新着ニュース30件
2021年3月9日 10:00
先頭車追従制御と車間距離維持制御で実現
豊田通商は3月5日、実証実験を重ねてきたトラックの後続車無人隊列走行技術を、2月22日に新東名高速道路の遠州森町PA~浜松SA(約15km)にて実現したと発表した。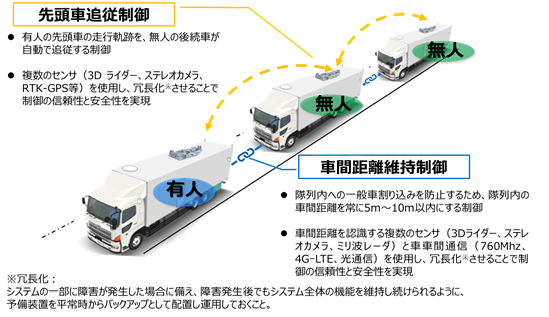
今回実現した技術では、ドライバーが運転する先頭車の大型トラックに、無人状態の大形トラック2台が時速80kmで車間距離約9mを維持しながら追従した。
後続車無人システムとは
後続車無人システムとは、ドライバーが運転する先頭車と、運転席無人の複数台の車とが通信で連結され、電子的な牽引による隊列走行を実現するシステムだ。後続車無人を実現するため、同システムでは、先頭車追従制御と車間距離維持制御の2つの制御を使用している。
先頭車追従制御は、3Dライダーやステレオカメラ、RTK-GPSなどの複数のセンサを使用し、先頭車の走行軌跡を、後続車が自動で追従する制御。
また、車間距離維持制御は、隊列の車間距離を常に5m~10m以内に維持し、隊列内への一般車の割り込みを防ぐ制御で、複数のセンサ(3Dライダー、ステレオカメラ、ミリ波レーダ)と、車車間通信を使用している。
これらの制御は信頼性と安全性を実現するため、予備装置を平常時からバックアップとして配置し、システムに一部障害が発生した場合も機能を維持し続けられるようにしている。
(画像はプレスリリースより)
豊田通商 ニュースリリース
https://www.toyota-tsusho.com/

-->
記事検索
アクセスランキング トップ10
特集
お問い合わせ